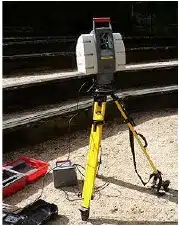
LIDAR (Light Detection And Ranging also LADAR) is an optical remote sensing technology that can measure the distance to, or other properties of a target by illuminating the target with light,often using pulses from a laser.
Abstract
LIDAR technology has application in geomatics, archaeology, geography, geology, geomorphology, seismology, forestry, remote sensing and atmospheric physics, as well as in airborne laser swath mapping (ALSM), laser altimetry and LIDAR Contour Mapping. The acronym LADAR (Laser Detection and Ranging) is often used in military contexts.
Robotics has become one of the most important fields in modern technology, combining mechanical engineering, electronics, and computer programming to develop machines that can perform tasks automatically.
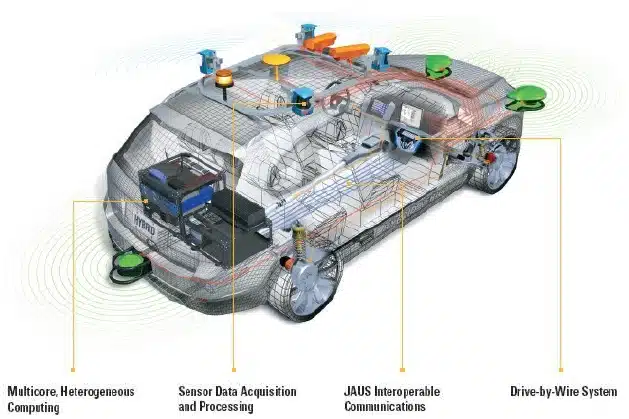
Robotic systems are widely used in industries, healthcare, manufacturing, transportation, and research because they improve efficiency, accuracy, and safety. The purpose of this capstone project is to design and develop a robotic car, a compact robotic system capable of performing automated movements using a microcontroller-based control system.
This seminar focuses on integrating different components such as motors, sensors, electronic circuits, and a protective outer body to create a fully functional robotic platform. The robotic car is designed to demonstrate the practical application of embedded systems and robotics concepts.
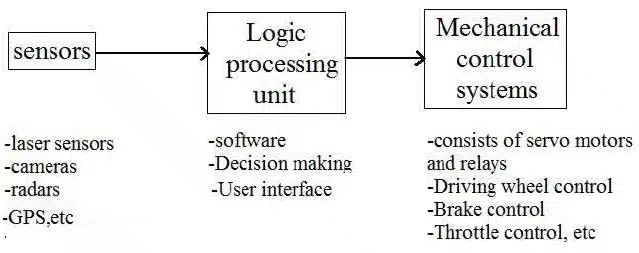
The system receives programmed instructions through the controller and converts them into physical movement using motors and mechanical components. Sensors are used to interact with the surrounding environment, allowing the robot to respond to obstacles or other external inputs.
Also Read : Solar Powered Vehicles
Google Street View
Google Street View is a technology featured in Google Maps and Google Earth that provides panoramic views from various positions along many streets in the world. It was launched on May 25, 2007, originally only in several cities in the United States, and has since gradually expanded to include more cities and rural areas worldwide.
Google Street View displays images taken from a fleet of specially adapted cars. Areas not accessible by car, like pedestrian areas, narrow streets, alleys and ski resorts, are sometimes covered by Google Trikes (tricycles) or a snowmobile. On each of these vehicles there are nine directional cameras for 360° views at a height of about 8.2 feet, or 2.5 meters, GPS units for positioning and three laser range scanners for the measuring of up to 50 meters 180° in the front of the vehicle.
There are also 3G/GSM/Wi-Fi antennas for scanning 3G/GSM and Wi-Fi hotspots. Recently, ‘high quality’ images are based on open source hardware cameras from Elphel. Where available, street view images appear after zooming in beyond the highest zooming level in maps and satellite images, and also by dragging a “pegman” icon onto a location on a map.
Using the keyboard or mouse the horizontal and vertical viewing direction and the zoom level can be selected. A solid or broken line in the photo shows the approximate path followed by the camera car, and arrows link to the next photo in each direction. At junctions and crossings of camera car routes, more arrows are shown.
Interactive algorithms for path following involve direct communication with external sources such as receiving navigation data from the leader or consulting GPS coordinates. The Follow-the-Past algorithm is one such example; it involves receiving and interpreting position data, orientation data, and steering angle data from a leader vehicle]. The objective is to mimic these three navigational properties in order to accurately follow the path set by the leader.
As orientation and steering angle are associated with GPS positional data, the following vehicle can update its navigational state to match that of the leader vehicle at the appropriate moment in time. One developed algorithm is best described as a placing a trail of breadcrumbs based on the leading vehicle’s position . A cubic spline fit is applied to the generated breadcrumbs to establish a smooth path by which to travel. This developed algorithm was tested and showed centimeter-level precision in following a desired path.


Pingback: Flexible Electronic Skin | Seminar Topics for ECE Students - Seminarsonly.com